
Vision:
Our Vision is to develop a small autonomous electric drive one passenger vehicle which can pysically connect to each other while driving the same route, side by side and in succession. This innovation is especially helpful in crowded cities to save space on the road. Small footprint of the vehicle is an advantage for finding parking slots.
Besides this advantage the vehicle is off road capable. It can crawl in different circumstances without the need of a plain road. With its solar roof it is independent from gas or electric source stations and can explore a wide range of an area.
Open Source:
This project will be developed with existing open source software and hardware available and will be and stay open source as well. Companies can benefit, rely and contribute to this platform to develop its own modified propiretary embedded systems applications, which can be derived from the xk32 platform and its open source applications. Resource can be found in Resource Hub.
Main goals:
- Small Open Source Autonomous 4Wheel Electric Drive One Passenger Vehicle.
- Innovative Autonomous Pattern Configuration.
- No steering wheel. No pedals. Control lever instead.
- Steer tilt technique, without suspensions.
Side description:
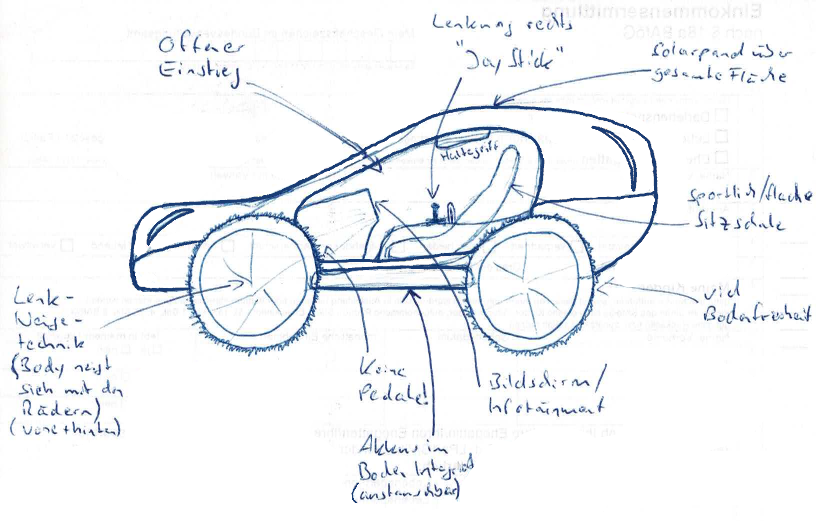
Steer tilt technique:

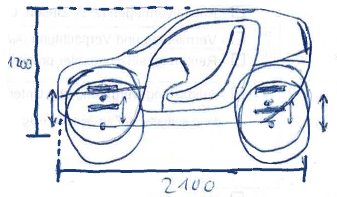
Ground clearance & dimensions:
- Open source project: openEdrive
- Initiator: scratchtronic
Frequently asked questions: (under construction)
1. How can I contribute to this project?
2. Do I get support for my own project?
3. I want to get a newsletter or stay up to date.
scratchtronic &at& pm &dot& me
Luebeck(2021) site is constantly changing/ no cookies utilized on this site